

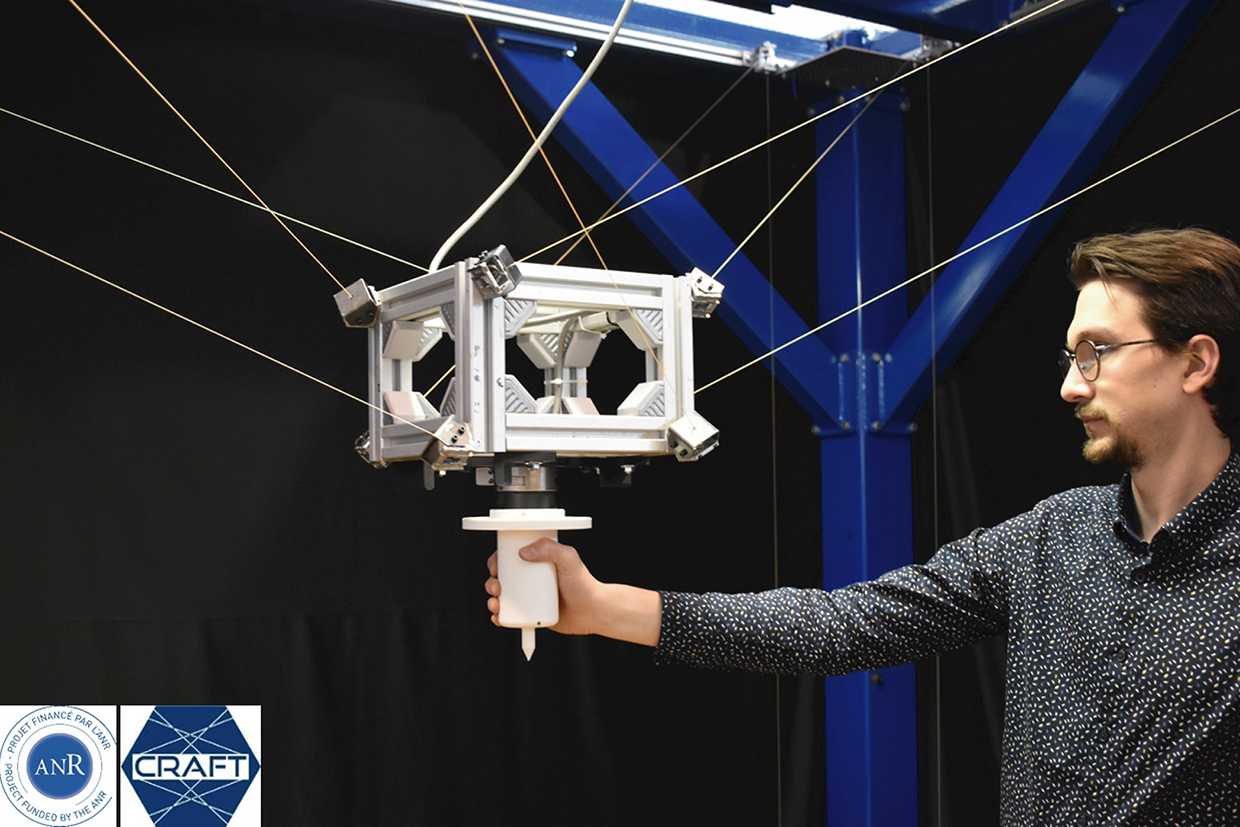
Le projet CRAFT vise à concevoir, modéliser et contrôler des robots parallèles entraînés par câbles (RPCs) pour des opérations industrielles agiles. Les RPC développés dans CRAFT sont capables : (i) de travailler dans des environnements encombrés, (ii) d’être autonomes, (iii) de permettre à l’utilisateur de co-agir et de co-manipuler avec le robot. Un autre objectif de CRAFT est de définir des normes pour les RPCs qui seront soumises aux autorités réglementaires.
Les robots parallèles entraînés par câbles (RPC) constituent une classe particulière de robots parallèles dont la plate-forme mobile est reliée à un cadre de base fixe par des câbles. L’amélioration des performances des RPC reste un défi car l’unilatéralité des câbles (les câbles peuvent tirer mais ne peuvent pas pousser) rend leur analyse beaucoup plus complexe que celle des robots parallèles à pattes rigides. Pour relever ces défis, nous développerons un cadre logiciel approprié de méthodes de résolution numérique, dont la validité sera vérifiée sur des expériences réalistes. L’intégration de la modélisation théorique, de la résolution numérique et des expériences se traduira par de fortes avancées technologiques et scientifiques sur le sujet. Nous visons donc à développer des RPC agiles, appelés robots parallèles reconfigurables commandés par câble (RRPC). D’un point de vue mécanique, changer la géométrie du RPC est relativement facile, soit en déplaçant les treuils, soit en utilisant des poulies pour modifier l’emplacement des points de sortie des treuils, soit en changeant l’emplacement des points d’attache des câbles sur la plateforme. Notre objectif est de développer un cadre de conception qui prend en compte les exigences de la tâche et une description de l’environnement du RPC. Le projet CRAFT vise à concevoir, modéliser et contrôler des RPC pour des opérations agiles en milieu industriel. Les RPC développés dans le cadre de ce projet doivent être capables de travailler dans un environnement encombré et d’aider les opérateurs à transporter et manipuler des pièces lourdes et de grande taille. Par conséquent, les RPC à l’étude auront deux modes de fonctionnement. Les robots seront soit autonomes et réaliseront certaines tâches qui sont établies hors ligne, soit l’utilisateur co-manipulera en toute sécurité des objets grands et/ou lourds avec le cobot dans des environnements vastes et encombrés. Les robots développés dans le cadre du projet CRAFT fourniront à l’utilisateur une bonne agilité dans de grands espaces de travail tout en assurant la sécurité de l’opérateur humain. Un défi concernant la sécurité de l’utilisateur réside dans la conception de l’IHM (interface homme-machine), de sorte que la sécurité intégrée dans le RPC garantisse que le contrôle du RPC est effectué de manière sûre par l’utilisateur. Un autre obstacle important à la diffusion des RPC, malgré leur grand impact potentiel, est le manque de normes. En effet, les règles existantes concernant les appareils de levage ne sont généralement pas adaptées aux RPC qui utilisent une technologie très différente. Un autre objectif du projet CRAFT est donc de fournir les données nécessaires à la définition de normes pour les RPC qui seront soumises aux autorités réglementaires.